
Talk:Cross product
| This It is of interest to the following WikiProjects: | |||||||||||||||||||||
| |||||||||||||||||||||

.jpg)
|
This page has archives. Sections older than 365 days may be automatically archived by Lowercase sigmabot III when more than 10 sections are present. |
Cross product does not exist
[edit]The result of the cross product of two rectilinear vectors can not be a third rectilinear vector. I will prove it to you in examples from the article "Angular Vectors in the Theory of Vectors" https://doi.org/10.5539/jmr.v9n5p71. The result of the cross product of two rectilinear vectors is the angular vector.
Example 3:
Let us assume that the modulus of rectilinear vector and two of its projections onto the coordinate
axes . One must find its third projection.
Solution:
Using the formula , the projection of the vector is equal




It is impossible to say more exactly in what side the vector projection is directed on an axis Oz. Now present our vector
as sum of coordinate vectors.
, then
and using the formula (cross product of basis vectors), let us find the projection of the vector , naming it
Conclusions: Rectilinear vector projection found by the second method:
1. is not consistent with the projection of the vector found by the first method,
2. is not consistent with the modulus of the specified vector, if one will find modulus using
3. specifies only a positive direction, although the direction is not precisely defined and can be both positive and negative
in the Oz axis.
Thus, the cross product is not consistent with the other properties of the rectilinear vectors, and has no right to
exist. — Preceding unsigned comment added by Ujin-X (talk • contribs) 13:54, 17 September 2017 (UTC)








- You are confusing two different things. In vector algebra the cross product, the one described in this article, is a product of two vectors with a vector result. It is well defined and has many applications.
- There are also a special class of vectors that have different properties to normal Euclidian vectors, in particular under reflection. These arise in many circumstances, not just from cross products, and have many names: polar vector, axial vector or pseudovector. They are also identified with bivectors in 3D. You have just rediscovered pseudovectors but as you can see from our article it is already a well understood topic.--JohnBlackburnewordsdeeds 15:00, 17 September 2017 (UTC)
- Nothing is mixed here. The cross product does not agree with the addition of vectors (or the decomposition of the vector into a sum of vectors). If you do not like this proof, consider example №4. It is based only on the logic of the cross product.
- Example 4: One should pay attention to another problem - the logical inconsistency of the cross product of vectors .
- Nothing is mixed here. The cross product does not agree with the addition of vectors (or the decomposition of the vector into a sum of vectors). If you do not like this proof, consider example №4. It is based only on the logic of the cross product.
- With the cross product of two rectilinear vectors, a new rectilinear vector is created which is perpendicular to both original
- vectors . It would be logical if and . That is, knowing any two vectors, one could find a third vector. But this is not observed (observed only if one presents the vectors as unit vectors).



- For example, if there are two rectilinear vectors , then



- that is, the vector


- Now we find the vector again and compare it with the original vector



- , that is there is a vector , and is not equal to the original vector. --Ujin-X (talk) 11:39, 18 September 2017 (UTC)


- Who told you that it should be equal to the original vector? Not at all. Boris Tsirelson (talk) 15:21, 12 October 2017 (UTC)
See how a similar example is solved using the angular and inverse vectors.
Example: Proposed changes to the cross product. When at the cross product of two rectilinear vectors, a angular vector is created d̑ . This vector is in the plane formed by rectilinear vectors. Its magnitude is equal to the area of some figure in this plane.
Suppose we are given two rectilinear vectors , then
d̑l̑m̑n̑l̑m̑n̑ , where l̑,m̑,n̑ - the basic angular vectors
d̑l̑m̑n̑l̑m̑n̑
, where - the projections of the angular vector onto the coordinate planes.
That is, the angular vector d̑ is in the plane OXY


















Now we find the rectilinear vector again and compare it with the original vector. For this we use the inverse vector. Thanks to it vectors can be transferred through the sign =, as in arithmetic. But the choice of a sequence of vectors in a cross product changes the results of calculations, and is always chosen individually.
For the solution, we need the cross products of the basis vectors
l̑m̑n̑l̑m̑n̑,then
d̑d̑l̑m̑n̑
Further, we use the projections of the inverse rectilinear vector


















that is there is a vector , and is equal to the original vector.
Now imagine that the angular vector d̑ is the torque. A rectilinear vector c̄ is a force, and a rectilinear vector b̄, this distance. And this example shows that we can find in the coordinate-vector form a torque from the force and distance, which is in the plane, where it should be. And we can solve the inverse problem, find the force from the torque, again in a coordinate-vector form. I emphasize that we could not find the last task before. And she decided because of the inverse vector and its projections.--Ujin-X (talk) 08:34, 14 October 2017 (UTC)

- Irrelevant; WP:NOTFORUM. Boris Tsirelson (talk) 09:40, 14 October 2017 (UTC)
- @Ujin-X: This is blatantly incorrect; the vector cross product is not even associative, and is anticommutative rather than commutative. The existence of a multitude of zero divisors (e.g. ) precludes any meaningful notion of an "inverse" in the sense of (and even given orthogonal , there are multiple orthogonal vectors such that ). You will not get that by simply relabeling the result as an "angular" vector as all vector spaces of dimension 3 are isomorphic. There is no reason that the cross product of the first two component vectors should equal the third. The paper is terribly written and was not worth our time to consider, as it does not discuss these concepts in a sufficiently rigorous manner.--Jasper Deng (talk) 18:28, 4 July 2018 (UTC)





- @Jasper Deng: You have a mistake --Ujin-X (talk) 10:33, 23 June 2019 (UTC)

- @Ujin-X: Don't see how this contradicts what I said at all. with the cross product is not and cannot be a division algebra, plain and simple, so your earlier notion of an "inverse vector" is complete nonsense.--Jasper Deng (talk) 10:39, 23 June 2019 (UTC)

Dimensions
[edit]Why is it so that a cross product of two vectors results in a resultant vector in a third dimension and a dot product of two vectors results in a resultant vector in the same plane? ABCDSocrates (talk) 07:13, 11 June 2019 (UTC)
- The result of a dot product is not a vector, but a scalar. Your question may be restated as "why some definitions have been chosen as they are?". The general answer is that the most useful definition are generally the best choice. Here, the usefulness can be measured by the number of applications that use these definitions. D.Lazard (talk) 09:36, 11 June 2019 (UTC)
- In fact, there was no choice for cross-product . Previously, this product was the only one, and they tried to write it into the theory of vectors. Now the cross product of four. And only now there is a choice. Of these four, we must choose a cross product c̑ consistent with vector theory. And the remaining 3 , ȃb̑c̑, ȃb̑ , will receive the status of uncoordinated cross product. And will be used only in geometric constructions.--Ujin-X (talk) 10:42, 19 June 2019 (UTC)





- @Ujin-X: This talk page is WP:NOTAFORUM for presenting your original ideas. There is no nontrivial vector-valued bilinear product of vectors in any dimension but 3 or 7. I sense you advocate the use of bivectors, which however are outside the scope of this article.--Jasper Deng (talk) 10:46, 23 June 2019 (UTC)
- Read A History of Vector Analysis to see that the two "products" were taken from the quaternion product to simplify the algebraic approach to geometry for engineering students at the dawn of the twentieth century. The slight modification of the cross product with jk = −i occurs in coquaternions, which provides an alternative mathematical model for appropriate uses. — Rgdboer (talk) 22:56, 23 June 2019 (UTC)
Alternative visual notation
[edit]We typically put new material at the end of the talk page (unlike other places on the web), so I moved your contribution here. I hope you don't mind. --Bill Cherowitzo (talk) 22:35, 13 November 2019 (UTC)
- This paper introduces a new, visual notation for many vector operations such as the cross product. It might be a nice addition to this page. But I'd first like to have some feedback about this idea. — Preceding unsigned comment added by Juliacubed (talk • contribs) 20:20, 13 November 2019 (UTC)
- In response let me say that the above mentioned preprint has not been vetted by any academic community and as such remains in the limbo of unreliable sources. Wikipedia does not publish "nice new ideas", only those things that have been accepted by the wider scientific community (in this case). If this preprint gets published and reviewed, then this may be looked at again. --Bill Cherowitzo (talk) 22:35, 13 November 2019 (UTC)
Potentially missleading and/or irrelevant part of the text?
[edit]The unit quaternions correspond to 90° rotations in 4D space. I am unsure wether this quote in the section about quaternions says that they correspond to 180° rotations.
- The cross product can also be described in terms of quaternions, and this is why the letters i, j, k are a convention for the standard basis on R3. The unit vectors i, j, k correspond to "binary" (180 deg) rotations about their respective axes, said rotations being represented by "pure" quaternions (zero real part) with unit norms.
What do you think, could this be missleading? I also wanted to ask wether this information is relevant, since it is mentioned right at the beginning of the section and I think the key information is on how the quaternion product involves the cross product mentioned below:
- In general, if a vector [a1, a2, a3] is represented as the quaternion a1i + a2j + a3k, the cross product of two vectors can be obtained by taking their product as quaternions and deleting the real part of the result. The real part will be the negative of the dot product of the two vectors.
Kind regards TheFibonacciEffect (talk) 10:49, 16 August 2020 (UTC)
- I have also tagged the part of the sentence beginning by "why", as I am pretty sure (I have no source under hand) that where used for the standard basis of a long time before the introduction of the quaternion.
- Also, it is not the "unit vectors" (of ) that correspond to rotations, but the "unit quaternions". D.Lazard (talk) 11:12, 16 August 2020 (UTC)

- I think heard that Quaternions where used before Vectors where a thing, but I'll have a read into that. Is it really a 180° degree roation not a 90°? TheFibonacciEffect (talk) 19:36, 16 August 2020 (UTC)
- Found it: On the site for Euclidean vector it says that:
- The term vector was introduced by William Rowan Hamilton as part of a quaternion, which is a sum q = s + v of a Real number s (also called scalar) and a 3-dimensional vector.
- TheFibonacciEffect (talk) 19:43, 16 August 2020 (UTC)
- ... But coordinates and coordinate axes (invented by Descartes) predate the concept of quaternions. One has to check the usual notation (in the first halve of the 19th century) for the points About the rotation, you are right, as while the square of a 180° rotation is the identity. D.Lazard (talk) 19:53, 16 August 2020 (UTC)
- Thats right, however the idea of the cross and dot product both stem from the Quaternion product. TheFibonacciEffect (talk) 20:37, 16 August 2020 (UTC)
- Not sure. The history section of Cross product begin with
In 1773, Joseph-Louis Lagrange introduced the component form of both the dot and cross products in order to study the tetrahedron in three dimensions.
This shows that the idea of the cross and dot product were known a long time before the quaternion product. D.Lazard (talk) 21:01, 16 August 2020 (UTC)
- Not sure. The history section of Cross product begin with
- Thats right, however the idea of the cross and dot product both stem from the Quaternion product. TheFibonacciEffect (talk) 20:37, 16 August 2020 (UTC)
- ... But coordinates and coordinate axes (invented by Descartes) predate the concept of quaternions. One has to check the usual notation (in the first halve of the 19th century) for the points About the rotation, you are right, as while the square of a 180° rotation is the identity. D.Lazard (talk) 19:53, 16 August 2020 (UTC)
- Found it: On the site for Euclidean vector it says that:
- Okay, if it's allright I would like to delete that part of the text, that will also make it more straightforward and readable, I think. Feel free to revert and discuss. TheFibonacciEffect (talk) 20:37, 16 August 2020 (UTC)


Definition: deletion of two sentences
[edit]I delete the two sentences
Using the cross product requires the handedness of the coordinate system to be taken into account (as explicit in the definition above). If a left-handed coordinate system is used, the direction of the vector n is given by the left-hand rule and points in the opposite direction.
These sentences seem false for the above definition of the cross product is intrinsic. It doesn’t use any basis and therefore the handedness of any basis. What is used in the definition is the handedness of the space.
Hence, the end of the paragraph had to be modified.--KharanteDeux (talk) 15:56, 6 June 2021 (UTC)
Cross product and handedness: deletion of few lines
[edit]I delete
So by the above relationships, the unit basis vectors i, j and k of an orthonormal, right-handed (Cartesian) coordinate frame must all be pseudovectors (if a basis of mixed vector types is disallowed, as it normally is) since i × j = k, j × k = i and k × i = j.
The vectors i, j and k don't depend on the orientation of the space. They can even be defined in the absence of any orientation. They cannot therefore be pseudovectors. Moreover, if this were true, then all vectors would be pseudovectors. Is the position vector 2i + 3j – 5k a pseudovector?
"Axial" and "polar" are physical qualifiers for physical vectors, that is to say vectors which represent physical quantities such as the velocity or the magnetic field. The vectors i, j and k are mathematical vectors, neither axial nor polar. In mathematics, the cross-product of two vectors is a vector. It's that simple!
So, we can say that the position vector is r = 2i + 3j – 5k and the magnetic field is B = 2i + 3j – 5k without any contradiction.
--KharanteDeux (talk) 15:10, 8 June 2021 (UTC)
- I agree with the deletion, although the error in the sentence is not exactly what KharanteDeux wrote. The truth is that the inner product induces an isomorphism between a vector space and its dual, that allows identifying vectors of the dual (pseudo-vectors) with normal vectors. Thus any vector can be considered either as a vector or as a pseudovector. So, in i × j = k, if i and j are considered as vectors, then k must be considered as a pseudovector. If i and j are considered as pseudovectors, then k must be considered as a vector. It is an error to consider one as a vector and the other as a pseudovector. In other words, as soon as an inner product has been defined, the distinction between vectors and pseudovectors is only a question of context or point of view. So the "must be" of the deleted sentence is definitively an error. D.Lazard (talk) 17:22, 8 June 2021 (UTC)
- @KharanteDeux, do you want to delete this talk section, since the words you wanted deleted are now long-gone? MathewMunro (talk) 08:57, 15 February 2024 (UTC)
In three dimensions, a pseudo-vector is associated with the curl of a polar vector or with the cross-product of two polar vectors (Wikipedia: Pseudovector)

- I can’t see how a vector of the dual space (that is a linear form) may be a pseudo-vector. Linear forms don't depend on the orientation, they aren't related to the cross product, they don’t transform in an unusual way.--KharanteDeux (talk) 15:05, 9 June 2021 (UTC)
Consistent hyphenation needed within the same page
[edit]Cross product appears 159 times.
Cross-product appears 5 times.
I came to wikipedia to find the most common practice.
I'm not sure google ngrams is giving me what I want. Universemaster1 (talk) 09:44, 23 May 2022 (UTC)
Generalized cross product and n-Lie algebra structure
[edit]The generalized cross product of n vectors in n+1-dimensional space satisfies the nth Filippov identity and so endows the space with a structure of n-Lie algebra. I have added this fact to the section Multilinear algebra, since the generalized cross product is defined there. Please, consider wether this is the right place to include it; perhaps it merits its own subsection? Jose Brox (talk) 10:22, 15 November 2022 (UTC)
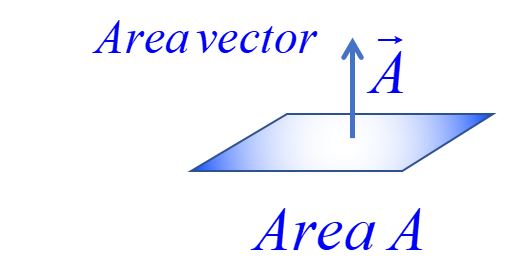
It's misleading to depict a cross-product as a one-dimensional arrow eminating from the origin, since it has squared units. It's an area-vector in the case of the cross-product of position or displacement vectors.
[edit]The article states: 'The units of the cross-product are the product of the units of each vector.' And that makes sense, because if it weren't invariant to a change of units, then it would be absurd. I suggest watching this quick video on area-vectors: https://www.youtube.com/watch?v=9GOoiaQq4GY, and I suggest using a graphic like this one: https://sites.science.oregonstate.edu/~hadlekat/COURSES/ph213/gauss/images/areaVector.JPG, with an arbitrary-sized arrow (or arrows) emanating from the surface (rather than the origin) indicating the direction, or alternatively, do away with the arrow for the cross-product, and instead just labelling the surfaces top and bottom appropriately. Also, the article states: 'Due to the dependence on handedness, the cross product is said to be a pseudovector', but surely the main reason why it's a pseudovector (ie not a real vector/not like common vectors) is that its units are squared. MathewMunro (talk) 05:39, 15 February 2024 (UTC)
{kind=link}
- @MathewMunro: No. You are conflating the cross product with bivectors, of which the cross product is the Hodge dual. The "area vector" you link is also not (directly) related; it is simply the (oriented) surface element that appears in a surface integral.--Jasper Deng (talk) 05:41, 15 February 2024 (UTC)
- @Jasper Deng, it seems to me that depicting a quantity that in fact has squared units as a simple arrow is far more conflating. MathewMunro (talk) 06:18, 15 February 2024 (UTC)
- @MathewMunro: Nope, not at all. Acceleration has units of meters times hertz squared; does that suddenly mean acceleration must be an "area vector" as well, in the "hertz space"? What about a partial antiderivative of the position vector with respect to position? You cannot make arguments from units alone. This is a long-settled question; you're not going to be changing the consensus here. If you still have questions, WP:RDMA is that way.--Jasper Deng (talk) 06:33, 15 February 2024 (UTC)
- @Jasper Deng It's hard to imagine what squared units could correspond to in the real world in the case of some units. I guess that not every type of real-world vector/unit will have a corresponding real-world cross product? Perhaps a cross-product of velocity vectors could correspond to something that was expanding or moving at a constant velocity in two dimensions simultaneously, like a 2d simplification of ripples on a pond - in which case, would it be more accurate to depict the cross-product with arrows radiating outward in all directions from the surface formed by the two vectors in the cross-product, in the plane of the surface. And in the case of pond ripples, you could even replace the parallelogram that's normally used to depict the area of a cross-product with a circle. Perhaps an acceleration vector cross-product could correspond to something like the motion of the perimeter of something that's growing at a linearly increasing rate simultaneously in two different directions on a 2d surface. MathewMunro (talk) 08:18, 15 February 2024 (UTC)
- @MatthewMunro: Ultimately, the current contents of the article are what the community has deemed to be WP:DUEWEIGHT. Any of what you're proposing is WP:OR or simply would not be due weight. The Poynting vector's direction has a clear physical meaning and is defined using a cross product. Continue your discussion at the reference desk, please.--Jasper Deng (talk) 08:21, 15 February 2024 (UTC)
- No worries buddy, I'm just a tourist. Thanks for all your efforts to explain and the links to related topics in particular. I have no intention of touching the article, but I hope you at least consider the different perspective I've put forward as worthy of staying up on the talk page for a while. MathewMunro (talk) 08:32, 15 February 2024 (UTC)
- @MatthewMunro: Ultimately, the current contents of the article are what the community has deemed to be WP:DUEWEIGHT. Any of what you're proposing is WP:OR or simply would not be due weight. The Poynting vector's direction has a clear physical meaning and is defined using a cross product. Continue your discussion at the reference desk, please.--Jasper Deng (talk) 08:21, 15 February 2024 (UTC)
- @Jasper Deng It's hard to imagine what squared units could correspond to in the real world in the case of some units. I guess that not every type of real-world vector/unit will have a corresponding real-world cross product? Perhaps a cross-product of velocity vectors could correspond to something that was expanding or moving at a constant velocity in two dimensions simultaneously, like a 2d simplification of ripples on a pond - in which case, would it be more accurate to depict the cross-product with arrows radiating outward in all directions from the surface formed by the two vectors in the cross-product, in the plane of the surface. And in the case of pond ripples, you could even replace the parallelogram that's normally used to depict the area of a cross-product with a circle. Perhaps an acceleration vector cross-product could correspond to something like the motion of the perimeter of something that's growing at a linearly increasing rate simultaneously in two different directions on a 2d surface. MathewMunro (talk) 08:18, 15 February 2024 (UTC)
- @MathewMunro: Nope, not at all. Acceleration has units of meters times hertz squared; does that suddenly mean acceleration must be an "area vector" as well, in the "hertz space"? What about a partial antiderivative of the position vector with respect to position? You cannot make arguments from units alone. This is a long-settled question; you're not going to be changing the consensus here. If you still have questions, WP:RDMA is that way.--Jasper Deng (talk) 06:33, 15 February 2024 (UTC)
- @Jasper Deng, it seems to me that depicting a quantity that in fact has squared units as a simple arrow is far more conflating. MathewMunro (talk) 06:18, 15 February 2024 (UTC)
Vector Algebra vs Linear Algebra Confusion
[edit]In the text I spot non-linear algebra vectors with a superscript 'T' attached to them, looking very much like the notation for transpose of linear algebra vectors and matrices. This "notation" looks very much home made to me.
In other places I find vectors and tensors on the left hand side of an equation, but linear algebra matrices and vectors on the right hand side. If the base vectors are left out from the notation, the reader should be informed about this.
Remember, this is an article about math, and the notation must live up to that level of precision. 2A02:1660:69AA:E500:BEAE:C5FF:FE26:2574 (talk) 20:09, 29 June 2024 (UTC)